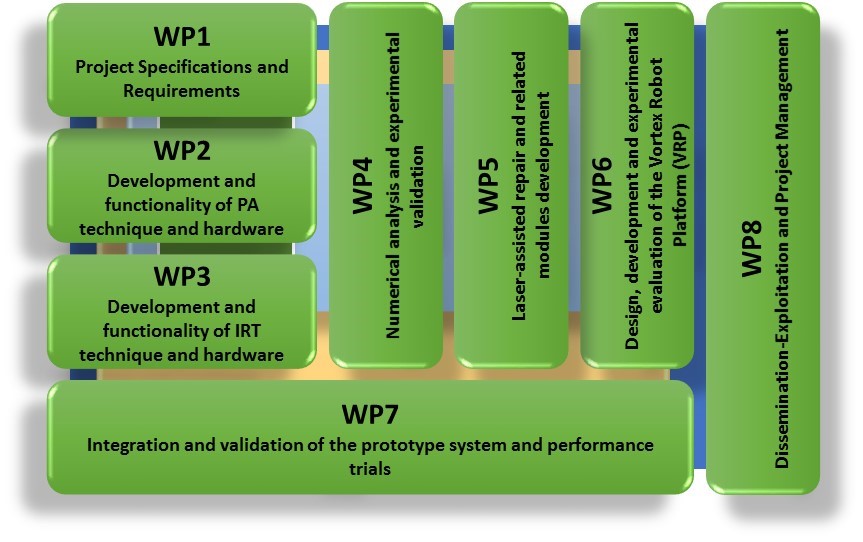
WP1 – Project specifications and requirements
- To arrive at detailed system specifications and requirements for all other work packages in the project
WP2 – Development Phased Array imaging technology and sub-system for composite material inspection
- To develop and experimentally validate PA imaging technology for inspection of defects in composite material specimens representative of aircraft structure
- To develop, experimentally validate and to customize appropriate PA transducers along with PA sub-system that are capable to be integrated in a vortex robot for the inspection of composite material damage detection and 3D quantification
WP3 – Development and functionality of IRT technique and hardware
- In this stage, the technological research is split into 2 different Transient IR thermographic NDT & Evaluation approaches
WP4 – Numerical analysis and experimental validation of reference, damaged and repaired aircraft representative structures towards residual properties prediction. Influence of repair geometry on the strength of the repaired structure.
- Development of all the required algorithms and macro-routines for the generation of defect location and through the thickness sizing of damage.
- Development of validated numerical models that are capable to predict the residual strength of damaged and/or repaired aeronautical subcomponents.
- Numerical investigation of different repair geometries for minimizing the machining and patch area and securing same strength of the repaired structure.
WP5 – Laser-assisted repair and related modules developmentTo optimize the laser processing parameters for material ablation in composites
- To develop a prototype of an automated laser device for removing damaged material and preparing the surface for repair
- To develop a special ultrasound inspection module for porosity measurement of the patch
- To develop a special patch placement module
- To develop a structural health monitoring methodology for a repaired composite structure
WP6 – Design, development and experimental evaluation of the Vortex Robot Platform (VRP)
- Conceptual design of the Vortex Robot Platform (VRP) following the main project requirements.
- Initial small-scale experimentation of the VRP’s main operating principles regarding adhesion and locomotion.
- Definition of the robot’s specifications and finalization of its conceptual design.
- Modeling of the VRP’s components and implementation strategies for controlling its overall performance.
- Development of the VRP’s robotic structure and implementation of all required mechanical and electrical components.
- Experimental evaluation sequences for ensuring the VRP’s operation according to set specifications.
WP7 – Integration and validation of the prototype system and performance trials
- This WP has a central role in the project. All technologies developed in the project will be integrated together with critical existing technologies into a robotic system enabling automated inspection, assessment and repair work of aircraft structures.